The flight navigation strategy of moths can be used to develop programs that help drones to navigate unfamiliar environments, report Ioannis Paschalidis at Boston University, Thomas Daniel at University of Washington, and colleagues, in the open-access journal PLOS Computational Biology.
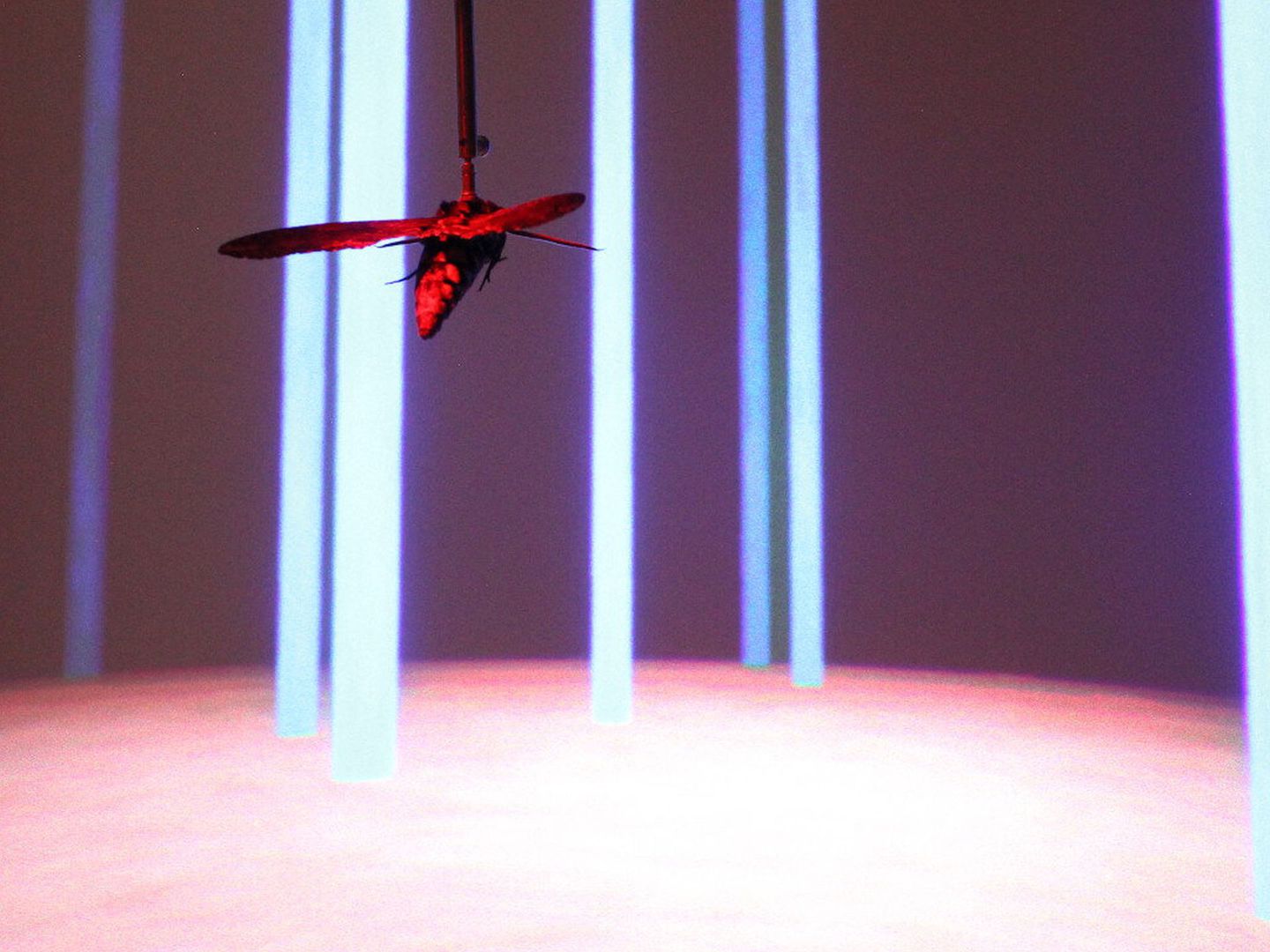
To understand how real moths plan their route, the researchers mounted 8 hawk moths (Mantuca sexta) on metal rods connected to a torque meter. In front of each moth they projected a moving forest scene created from beams of light for the moth to navigate. They captured data from the moth flight and built a mathematical model to describe the moth trajectory through the virtual forest.
The flight data were translated into a decision-making program that could be used to control a drone. They compared how the drone and the moth performed in simulations of the same forest layout, as well as new configurations with different densities of trees.
The researchers found that hawk moths mainly rely on the pattern created by the apparent motion of objects caused by their flight, which agrees with studies of flight behavior in other insects.
However, the flight programs optimized for drones performed 60% better in the simulated forest because they also incorporated information about the exact location of objects in their surroundings into their navigational decisions.
Although the researchers were able to optimize the strategy used by moths to improve performance in certain environments, the moths’ strategy was more adaptable, performing well in a variety of different forest layouts. The moth model performed best in dense forests, suggesting that hawk moths have evolved a flight strategy adapted to the thick forests they often encounter.
The researchers say that by using real data from animal flight paths they can program bio-inspired drones that will be able to navigate autonomously in cluttered environments.
Read Full Research Report








{kind=link}